By Paul McLellan, Cadence
車載網路是乙太網 (Ethernet) 的最新應用領域,但鑒於乙太網已經存在了將近 50 年,讓我們先來回顧一下其發展歷史。
乙太網的發展歷史
乙太網於 1971 年問世,當時被稱為 AlohaNet,是世上第一個無線分組資料網路。從它的名稱中可以猜到,它誕生於夏威夷。夏威夷大學主要的分時電腦系統位於歐胡島校區,但在其他島嶼上也有這所大學的校區。該系統以衛星為基礎,其中一個細節值得注意:這套系統使用了共用的無線通道。如果系統想發送信號,需等到通道空閒時,才能將信號發送給衛星。它還會偵聽衛星下行鏈路。由於延遲,通道很有可能只在啟動傳輸時才可使用,資料包還會與來自另一個傳輸者的另一個資料包發生衝突。第一級重傳將發現這種情況,並在等待片刻後再次嘗試傳輸。有一個常見的網路通訊協定可用於處理端到端確認、以其他方式損壞的資料包等等。
Xerox PARC 研究中心的 Robert Metcalfe 和 David Boggs 在 20 世紀 70 年代初設計出了最初的乙太網,其中一些是基於 AlohaNet設計的;Robert 在攻讀博士學位期間對 AlohaNet 有所涉獵。儘管以“乙太”命名,乙太網並不是像 AlohaNet 那樣在空氣中傳播,而是透過同軸電纜傳輸資料。但二者擁有一些相同的功能:在通道空閒時進行傳輸、偵聽衝突,並自動重傳。當時,PARC 研究中心的所有 Alto 電腦都與最初的乙太網聯網,傳輸速率為 3Mb/s。
第一個商用乙太網是 1980 年推出的 DIX 乙太網,傳輸速率為 10Mb/s。DIX 是 DEC-Intel-Xerox 的首字母縮寫,代表了創建該標準的三家公司:一家製造電腦並需要局域網技術的公司;一家製造晶片以降低成本的半導體公司;以及一家首先提出該想法的公司 (也是當時唯一一家擁有此類網路運營經驗的公司) 。網路的「類型」為 CSMA/CD,這是「載波監聽多路訪問衝突檢測」的首字母縮寫。這個 10Mb/s 乙太網也透過單個共用的同軸電纜傳輸資料。不久後,這變成了 IEEE 802.3 標準。
逐漸地,所有其他網路技術 (例如 Apollo 的權杖環網、劍橋環網等等) 都被乙太網取代。在 20 世紀 90 年代,共用的同軸電纜被點對點雙絞線 (標準電話線) 所取代,利用交換機和路由器將流量傳送到目的地。近 50 年後的今天,乙太網幾乎徹底打敗了其他的有線 (或光纖) 網路技術。雲資料中透過乙太網將伺服器連接到機架式路由器,而機架式路由器也是透過乙太網在資料中心內進行連接。資料中心也透過乙太網相互連接。

車載網路
然而,在汽車上還存在其他的有線標準,特別是 CAN 匯流排 (CAN 是指控制器局域網的英文縮寫) 。如果車內的資料傳輸量很小,比如座椅調整、後視鏡調整、收音機調頻,倒車雷達等等,那麼 CAN 匯流排完全可以勝任。可是,向 ADAS (高級駕駛員輔助系統) 和自動駕駛的轉變改變了一切。現在,典型的汽車架構擁有功能強大的中央電腦,並與攝像機、雷達和雷射雷達的信號源相連接。這需要大量頻寬,超出了 CAN 匯流排 (以及 LIN、FlexRay 等其他技術) 所能提供的頻寬。當我們需要具有大量頻寬的有線網路時,實際上只能選擇乙太網,因為這樣才可以利用晶片、軟體、測試設備、網路監控等組成的整個生態系統。
乙太網的另一個優點是它在非屏蔽雙絞線上運行。這意味著可以顯著降低線束的重量和複雜性。據說,有些線束可以達到 50 公斤。這個重量可不輕,會影響續航里程,更別說高昂的生產成本了。可以說,汽車是靠線束才成為一個整體,如果線束出了問題,汽車通常就會報廢——購買新車比修理舊車更划算。
PARC 初代 3Mb/s 乙太網 (以及梅特卡夫定律, Metcalfe’s Law) 的發明者 Bob Metcalfe 在《車載乙太網:權威指南(Automotive Ethernet: The Definitive Guide)》的前言中寫到:
正如我 40 年來一直在說的那樣:「如果你需要網路連接,無論是哪方面的網路連接,乙太網就是答案。」在這種情況下,我們可能會考慮兩個相關問題。「乙太網為什麼用了這麼久才進入汽車領域?乙太網在汽車領域的應用前景如何?」
今後的汽車將配備車載乙太網。
車載乙太網
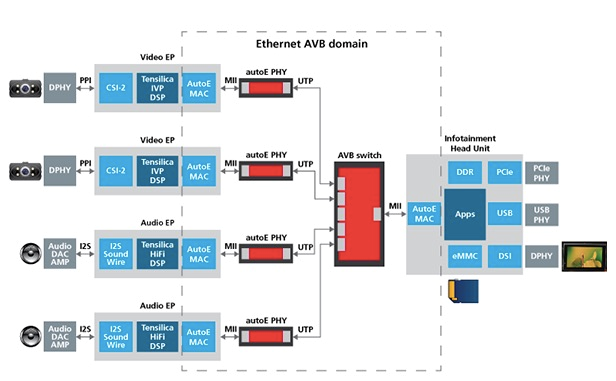
上圖顯示了車載乙太網架構,設備分佈在汽車周圍,透過車載乙太網與車載主機和交換機連接。除了資料中心所需的乙太網功能外,車載乙太網還需要支援時間敏感網路 (TSN) 和 IEEE 1722 音訊視頻橋接 (AVB) 傳輸協議。這些技術使車載網路可以提供有關延遲和同步的服務品質 (QoS) 保證。
如何進行車載乙太網設計
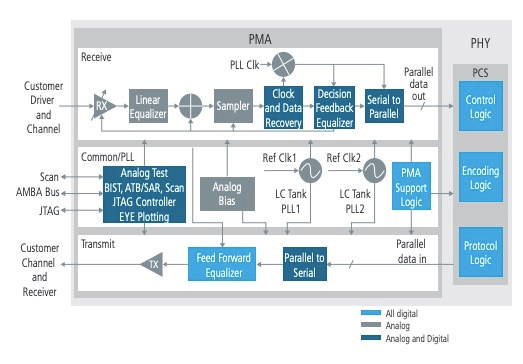
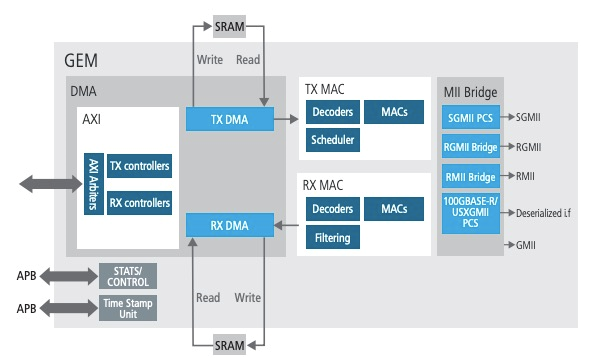
乙太網介面包括三部分:PHY、MAC 和 控制器。對於所有這三部分,Cadence 都有可用的設計 IP (DIP)。
PHY 是將晶片連接到物理介質的類比單元,就車載乙太網而言,這是雙絞銅線,也稱為 100Base-T1。
MAC 是媒體存取控制器,負責處理乙太網介面除 PHY 以外的其他所有方面。Cadence 在千兆乙太網 MAC 方面的 IP 符合 IEEE 802.3 標準,而且具有高度的可定制功能,並支援整合的 1000BASE-X PCS、帶有高級 AXI 卸載功能和描述符緩存的高性能 DMA、QoS、IEEE 1588 和 TSN/AVB 功能,支援任何應用。它還支援許多其他功能,包括 VLAN、TCP/IP 卸載和遠端網路監控 (RMON)。
Cadence 10G/2.5G/1G 用於汽車應用的多速乙太網控制器 IP 是高度可定制的軟控制器 IP,符合 IEEE 802.3 標準。為了支援各種乙太網應用,車用控制器 IP 具有 1000BASE-X 和 USXGMII PCS 整合模組,帶有高級 AXI 卸載功能和描述符緩存的高性能 DMA、QoS 和 IEEE 1588。時間敏感網路/音訊視頻橋接 (TSN/AVB) 功能可實現關鍵資料的統一乙太網通信,不會在共用網路中造成流量擁塞。另外,車用控制器 IP 還支援許多其他功能,包括 IEEE 802.3az 高能效乙太網 (EEE)、VLAN、TCP/IP 卸載和遠端網路監控 (RMON)。
要分析構成網路的線路,可使用 Sigrity™ SystemSI 車載乙太網通道模擬。透過物理乙太網通道分析 ECU 到 ECU 的通信性能,從而自動進行晶片到晶片的信號完整性分析。這使我們可以測試 IP 的不同組合、不同的電纜長度、屏蔽與非屏蔽 的效果對比,老化以及針對車載乙太網 100Base-T1 PHY 的合規性檢查。
要分析發送器和接收器,針對 100Base-T1 BroadR-Reach PHY 的車載乙太網合規性檢查涉及到針對 IP 所提供的 IBIS 和 AMI 模型。要更深入地瞭解如何完成此操作,請參閱文章:《了解 DDR5 技術之前你需要知道什麼是 AMI 與 IBIS》。
使用 Sigrity SystemSI 模擬可以在無需製作實物樣板的情況下,對輸出下降、功率譜密度、抖動、時鐘頻率、失真和回波損耗進行特性分析,如欲瞭解詳情,點擊觀看下方視頻:
中文字幕 / 英文配音, 建議在 WIFI 環境下觀看並注意調整音量


譯文授權轉載出處
長按識別 QRcode,關注「Cadence 楷登 PCB 及封裝資源中心」

歡迎關注 Graser 社群,即時掌握最新技術應用資訊


